ドアミラー塗装用回転治具(ドアミラー塗装システム)
Rの技術は回転治具設計も含まれます。

回転塗装に重要な治具設計は、塗膜性能や、塗装コスト、品質に大きな影響を及ぼします。ワークの取り付け位置や傾き一つとっても、影響する重要な要素です。回転治具設計は、回転塗装「Rの技術」の重要な技術の一つです。
ロボットに無駄な動きをさせない様、ワークを配置する
ドアミラーベース部品

ドアミラーベース部品
ドアミラーのベースの部品を回転治具に取り付けた例です。 直径約500mmの円の範囲以内にワークを並べ、塗装が必要な面を外周に向けて配置しています。そして、回転するワークにロボットの動きをイメージします。シンプルなロボットの軌道線が見えてきたところがベストなワークの配置位置です。その位置で、受け治具を設計します。
ドアミラーカバー部品

ドアミラーカバー部品
ドアミラーカバー部品を回転治具に取り付けた例です。 このワークは、回転をイメージすると比較的に単純な円柱の像が描かれます。その外周に沿ってロボットをティーチングすることで、無駄なロボットの動きがなく、薄膜の多重塗装を短時間で実現できます。 取り付け個数は、ワークの大きさや形状を考慮して、配置します。
ロボットの動きをイメージして
ロボットの動きとスプレー条件
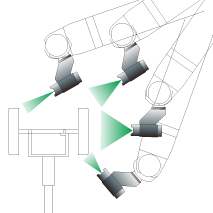
ロボットの無駄な動きは、塗装時間に大きな影響を及ぼします。 回転するワークは、円柱もしくは円錐を描きます。外周が一つの面となります。その面に対してロボットが無駄な動きをしないようにティーチングします。通常の網塗りや固定ワークにティーチングするのとは違い、向かってくるワークにスプレーするので、ロボットのティーチングは至極シンプルで簡単に行えます。(デスクパック、ケイタイパック)
受け治具設計
ドアミラーパーツの治具設計の例

治具設計時に考慮する要件
- ドアミラーパーツ塗装用の受け治具には、ワークの取り付け位置や、縦置き横置き、塗装時間等、数々の要件を考慮して設計します。
- 生産量・ロボットの動き・膜厚・タレ・スケ
ワークのハンドリング
取り外しを考慮した治具

ワークの取り付けやすさを考慮
回転塗装に使用する治具は、塗装時にワークが外れたりしない様しっかりと固定されていなければなりません。また、取り付け取り外しの際、作業性が悪くては生産性が落ちるどころか、品質にも影響します。
治具の種類
ワークの形や条件による治具設計の例

ドアミラー用治具には基本的に、ワークを平置き(横付け)と縦置き(縦付け)があります。塗料の性能、要求膜厚など要求品質や、時間単位の生産量、塗装時間等の要求条件を考慮し、ロボットの動作に無駄(遊び)が発生しない様考慮して選択します。
(左)平置き4個付け回転治具
ロボットの動きに無駄がなく、極めてシンプルで薄膜の多重塗装が実現する。(ドアミラーカバー)
(中)平置き3個付け裏向き回転治具
ドアミラーの特に縁や中を塗装するための治具例。(ドアミラー本体)
(右)縦置き3個付け回転治具
ドアミラーベースを細部に渡り全体を塗装。(ドアミラーベース)
治具の設計時に考慮すべき点
塗装コストは、治具の設計次第で大きく変化します。数々の要点をイメージしながら最適な治具(ワークの傾きを含める配置)を設計します。
塗装時間や生産量
1治具当りに取り付け可能な数を把握します。
塗装すべき範囲とロボットの動き
塗るところ、塗らないところや、垂れそうなところ、スケそうなところをイメージします。
取り付け、取り外し、ハンドリング
ハンドリングロボットで移載するときや、塗装の回転時に動かず・外れないワークの取り付け方法また、アンロード、検品時に取り外しがしやすい方法を考慮する。
治具サイズ
ワーク取り付け時の円形サイズが直径約500mm程度以内に収まるように設計する。
ロボットの動き
治具を回転させたときにロボットが無駄な動きをしないことをイメージします。
ゴミ不良のもとを作らない
オーバースプレーや、浮遊ゴミが付着しにくい構造を考慮する。

生産量や、膜厚、塗装時間、ハンドリング等を考慮して設計しています。
オプション・関連製品
更新日:2017年7月21日